Dokumentation Projekt:
Wirkungsweise eines Schrittmotors:
Klassifizierung von Schrittmotoren:
In der Praxis gibt es unzählig viele verschiedene Arten von Schrittmotoren. Eine exakte Beschreibung dieser verschiedenartigen Typen würde allerdings den Rahmen dieser Projektdokumentation sprengen. Daher möchten wir lediglich auf die Grundtypen eingehen und deren allgemeine Funktionsweise beschreiben.
Die Angabe der Phasen kennzeichnet die Anzahl der Spulen:
|
|
|
|
|
|
|
Bild 1a: 2-Phasen- Schrittmotor |
|
Bild 1b: 5-Phasen- Schrittmotor |
|
Allgemeiner Aufbau:
|
Die
gebräuchlichsten Schrittmotoren (Stepper, Stepmotoren) bestehen aus einem
Permanentmagneten
als Rotor, und einer geraden Anzahl von Spulen als Elektromagneten im Stator. Die
Spulen sind gegenüberliegend angeordnet und bilden sogenannte Polpaare. Wegen
der gleichzeitigen Verwendung von Permanent- und Elektromagneten bezeichnet
man Schrittmotoren auch als Hybridmotoren. Das
nebenstehende Bild zeigt den prinzipiellen Aufbau eines Schrittmotors,
bestehend aus dem Rotor und 4 Spulen (L1-L4, also 2 Polpaaren) |
Bild 2 |
Betriebsarten:
|
Unipolare
Schrittmotoren |
Bipolare
Schrittmotoren |
|
Bild 3a |
Bild 3b |
|
Jede Spulenwindung wird nur in eine Richtung (unidirektional) polarisiert. Die Spule hat einen Mittelabgriff. |
Die Spulenwindungen werden in zwei Richtungen (bidirektional) polarisiert. Es gibt keinen Mittelabgriff, daher müssen die Spulen abwechselnd in beide Richtungen polarisiert werden. |
Blockschaltbild:
|
Bild 4 |
Unipolarbetrieb: Der Mittelabgriff wird auf +UB (z.B. 12 V) gelegt. Wird nun an A1 Masse angeschlossen, so erzeugt der obere Teil der Spule ein Magnetfeld. Um nun ein Magnetfeld in die entgegengesetzte Richtung zu erzeugen, wird A1 wieder von Masse getrennt, und A2 an Masse angeschlossen. Es ist auch möglich den Mittelabgriff mit Masse zu beschalten, und an A1 bzw. A2 positive Spannung anzuschalten. Dies simuliert dann den Bipolarbetrieb |
Bipolarbetrieb: Bei reinen Bipolarmotoren ist der Mittelabgriff nicht vorhanden. Handelt es sich dabei um Motoren, die beide Betriebsarten unterstützen, wird der Mittelabgriff frei gelassen. Durch Anschließen von +UB an A1 und Masse an A2 wird ein Magnetfeld erzeugt. Um ein entgegengesetzt gerichtetes Magnetfeld zu erhalten, muss die Spannung umgepolt werden (A1 an Masse, A2 an + UB). |
Arten der Ansteuerung:
|
|
Wellenschritt |
Vollschritt |
Halbschritt |
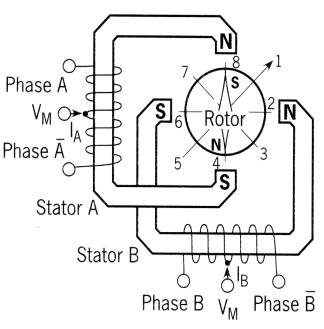
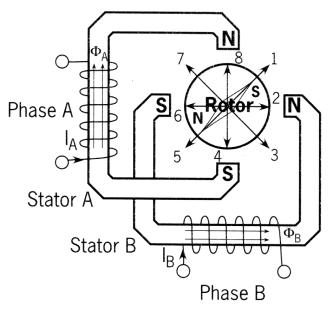
|||||||||||||
|
Phase |
8 |
2 |
4 |
6 |
1 |
3 |
5 |
7 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
A |
x |
|
|
|
x |
|
|
x |
x |
|
|
|
|
|
x |
X |
|
B |
|
x |
|
|
x |
x |
|
|
x |
x |
x |
|
|
|
|
|
|
-A |
|
|
x |
|
|
x |
x |
|
|
|
x |
x |
x |
|
|
|
|
-B |
|
|
|
x |
|
|
x |
x |
|
|
|
|
x |
x |
x |
|
Erklärung: Die obige Tabelle zeigt, dass bei den ersten beiden Ansteuerarten jeweils 4 Phasen vorhanden sind, während bei der dritten 8 benutzt werden. Die angegebenen Phasen beziehen sich auf die oberen Bilder (3 a,b). Hier ist egal, ob es sich um Unipolar, oder Bipolar-Motoren handelt.
Merkmalvergleich:
Der Wellenschritt-Modus ist für den praktischen Einsatz der am wenigsten geeignetste. Er besitzt von den hier vorgestellten Ansteuerrungsarten das geringste Drehmoment. Sein einziger Vorteil: Der Motor benötigt weniger Strom, als bei den beiden anderen Betriebsmodien.
Der Vollschritt-Betrieb bringt bei doppeltem Stromverbrauch das doppelte Drehmoment auf.
Dieser Modus wird in der Praxis am häufigsten eingesetzt.
Als drittes wäre noch der Halbschritt-Modus zu nennen. Dieser ist, wie aus obiger Tabelle ersichtlich, eine Kombination aus den beiden oben genannten Modien. Der Vorteil dieser Beschaltung ist, dass (mit dem gleichen Motor) mit ihr die doppelte Schrittanzahl pro Umdrehung erreicht wird.
Entwurf der Ansteuerung:
Identifizierung der Motoren:
Da bei den uns zur Verfügung gestellten Motoren nur vier Anschlussleitungen vorhanden sind, handelt es sich offensichtlich um reine Bipolarmotoren mit zwei Phasen. Mit einem Ohmmeter haben wir dann ermittelt, welche Anschlüsse zueinander gehören.
Realisierung der Ansteuerung:
Weil es sich um Bipolarmotoren handelt konnten wir nicht, wie ursprünglich geplant, eine einfache Treiberschaltung an die Ausgänge des Parallelports anschalten.
In Zusammenarbeit mit Professor Baader wurde dann die jetzt vorhandene Gegentaktschaltung entwickelt. Die Schaltung zur Ansteuerung von einem Motor wurde auf einer Testplatine aufgebaut. Im Laufe der umfangreichen Tests wurde dann festgestellt, dass es zur Erreichung eines ausreichenden Drehmoments nur die beiden Ansteuerungsmöglichkeiten Vollschrittbetrieb und Halbschrittbetrieb gibt. Wir haben uns dann aufgrund der ruhigeren Laufweise für den Halbschrittbetrieb entschieden.
Nach Abschluss der Testphase überlegten wir uns, wie die gesamte Schaltung am Besten aufzubauen sei. Hier wurde schnell festgestellt, dass eine Realisierung auf einer Loch- oder Streifenrasterplatine sehr kompliziert wäre.
Aufgrund dieser Tatsache haben wir dann beschlossen, mit dem Layoutprogramm „Eagle“ eine eigene Platine zu entwerfen. Dies erforderte zuerst eine Einarbeitung in „Eagle“. Als die Schaltung fertig in „Eagle“ eingegeben war, musste die Schaltung in ein Platinen-Layout umgesetzt werden. Nach vielen Versuchen, unterschiedlicher Anordnungen, wurde festgestellt, dass es ohne Einsatz von 5-10 Lötbrücken nicht möglich wäre, die Platine komplett zu routen (Alle Leiterbahnen ohne Kreuzungen auf der Platine unterzubringen). Daher sind wir zur Double-Layer Platine gekommen.
Zur eigentlichen Platine gibt es folgende Anlagen:
- Leiterbahnen Oberseite
- Leiterbahnen Unterseite
- Bestückungsplan
-
Die beiden Leiterbahnseiten wurden auf Folie ausgedruckt, und zu einer Tasche zusammengeklebt, damit die beiden Leiterbahnseiten direkt übereinander waren. Der weitere Vorgang der Platinenherstellung wurde im WET-Labor mit Unterstützung durch den Laboringenieur Herrn Krämer ausgeführt. Die Platine wurde in die Tasche gelegt, und belichtet. Daraufhin wurde die Platine ins Entwicklerbad gegeben. Als letzter Schritt der Platinenherstellung wurde die Platine in die Ätzmaschine gegeben, damit sich das Kupfer ablöst.
Die nun fertige Platine wurde im Diplomantenlabor gebohrt, und im Projektlabor bestückt.
Funktionsweise der Schaltung: (Schaltung s. Anlage)
Die Eingangsschaltung (R1, Q1, R2 bzw. R3, Q2, R4) ist dafür zuständig, die vom Parallelport des Computers ausgegebene Spannung von 5 V auf die von den Leistungstransistoren (Q3, Q4) benötigten 12 V zu verstärken. Des weiteren darf der Ausgang des Parallelport nur mit maximal 20 mA belastet werden, was zur Ansteuerung der Leistungstransistoren nicht ausreichen würde. R1 ist für den Schutz des Eingangstransistors zuständig. R2 ist als Kollektorwiderstand geschaltet und legt je nach Eingangszustand 12 V oder Masse an die Leistungstransistoren. Die beiden Transistoren Q3 und Q4 sind Komplementärtransistoren (d.h. sind zwar vom Typ her verschieden (n-pn, p-np) , haben jedoch die gleichen Werte).
Der Brückengleichrichter D1 dient dazu, um Induktionsspannungen von den Motorwicklungen kurzzuschließen, und verhindert somit eine Zerstörung der Transistoren.
Die ganze Schaltung arbeitet im Gegentaktbetrieb.
Ansteuerung 1. Richtung:
Eingang 1 High-Potential (5 V) à Q1 steuert durch à Betriebsspannung liegt an R2 à Basis von Q3 und Q4 liegen an Masseà Q3 schaltet durch àMotorwicklung 1/2 liegt an Masse
Eingang 2 Low-Potential (0V) à Q 2 sperrt à Basis von Q5 und Q6 liegt auf Betriebsspannung à Q6 schaltet durch à Motorwicklung 1/1 liegt an Betriebsspannung
à somit liegt der Motor mit einem Anschluss an Betriebsspannung, und mit dem anderen auf Betriebsspannung. Wenn die Eingänge vertauscht werden ändert sich die Polarität an den Motorwicklungen, und somit auch die Richtung des Magnetfeldes.
Änderung:
Aufgrund der Tatsache, dass einer unserer Motoren für die mechanische Realisierung zu schwach war, haben wir überlegt, ob wir die mechanische Realisierung ändern sollen, oder ob wir einen neuen Motor verwenden sollten. Professor Baader hat uns dann andere, stärkere Motoren besorgt, mit denen die Realisierung bei bestehender Mechanik möglich sein sollte. Nun waren wir allerdings mit einem neuen Problem konfrontiert: Im Gegensatz zu unseren alten Motoren, die einen ohmschen Widerstand von 150 W pro Wicklung besitzen, sind es bei den neuen Motoren nur 8 W. Nach einem kurzen Blick auf die Schaltung und ein paar Berechnungen wurde sofort erkannt, dass dies wohl nicht funktionieren würde. Da über den Motor ein Strom von etwa 1,5 A fließt, ist es nicht möglich die Leistungstransistoren voll auszusteuern. Dies hätte eine enorme Erwärmung der Transistoren zur Folge, die leicht zur Zerstörung führen kann.
Abhilfe:
1. vor die Leistungstransistoren noch Kleinsignaltransistoren schalten, um den Leistungstransistoren eine volle Durchsteuerung zu ermöglichen.
à aufgrund der fertig geätzten Platine nicht möglich.
2. Anstelle der seither verwendeten Leistungstransistoren müssen Darlington-Transistoren eingesetzt werden.
Nachdem wir Möglichkeit Nr.2 durch austauschen der entsprechenden Transistoren realisiert haben, arbeitet die Schaltung problemlos mit der Mechanik zusammen. Allerdings ist nun unser (für die ursprüngliche Schaltung entwickeltes) Netzgerät zu schwach.
Anlagen:
Bestückungsplan der Platine
Leiterbahnen Platinenunterseite
Leiterbahnen Platinenoberseite
Auszug aus der Schaltung
Gesamte Schaltung
Stückliste